G-NAVPTM 架构电路的设计方法与布局注意事项
摘要
在设计程序中,元件值的设计和 PCB 布局对电源的性能有很大的影响。若能注意 PCB 布局上的细节,对于实现低开关损耗、干净无噪声及稳定的操作是非常有利的。适当的选择元件可以使所设计的电源较容易通过英特尔 (Intel) 及 AMD 的规格。此应用须知将介绍 G-NAVPTM 控制架构电路的设计方法,包括:导通时间设定、开关频率设定、负载线设定和 DCR 电流检测网络设定。最后,将对 PCB 的布局规则提出建议,以期降低噪声干扰,使控制器更为可靠。
1. 设计方法与元件选择
以下的设计方法是以 RT8884B 为例子,并满足英特尔的 VR12.5 规格。在应用 RT8884B 时,有三个主要的设计程序:第一步是导通时间和开关频率的初始设定,第二步是 DCR 电流检测网络的设计,而最后一步则是完成负载线的设计。
|
CPU操作条件
|
|
输入电压
|
12V
|
|
相位数
|
3
|
|
VBOOT
|
1.7V
|
|
VDAC(MAX)
|
1.85V
|
|
ICCMAX
|
106A
|
|
ICC-DY
|
60A
|
|
ICC-TDC
|
55A
|
|
负载线
|
1.5mΩ
|
|
快速电压回转率
|
12.5mΩ / µs
|
|
最大开关频率
|
300kHz
|
请参阅 Shark Bay VRTB 电力输送指南,其中所建议的输出滤波器如下所示:
输出电感:360nH / 0.72mΩ
输出大型电容:560µF / 2.5V / 5mΩ (max),4 至 5 个
输出陶瓷电容:22µF / 0805 (在上层最多可放 18 个)
1.1. 导通时间与开关频率的初始设定
一般说来,较高的开关频率可产生较快的瞬态响应和较小的稳态输出纹波,并且可使用较小尺寸的功率元件和印刷电路板的空间。然而,较高的开关频率通常导致较低的转换效率,较差的噪声抑制能力及有过热的问题;因此,最大开关频率的合理范围是受到以上综合因素的限制。最大开关频率一旦决定了之后,用开关频率和占空比之间的关系即可算出最大导通时间。
 (1)
(1)
其中,VDAC(MAX) 是参考电压,fSW(MAX) 是最大开关频率,而 VIN(MAX) 是最大输入电压。下面所显示是以设计 RT8884B 为例。

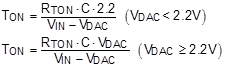
因为 RT8884B 采用恒定导通时间控制, CCRCOT(固恒流纹波之 COT)此项专利技术是利用输入电压和 VID 码来产生适应性的导通时间,及恒定的电流纹波;如此可在不同的输入和输出电压范围内,将输出电压纹波控制到几乎是恒定的。在输入电压端子和 TONSET 接脚之间接上的电阻 RTON ,可用来设定导通时间。
 (2)
(2)
其中 C = 18.2pF,VIN 是最大输入电压,VDAC 是参考电压,而 TON 是方程式 (1) 所决定的导通时间。下面所计算的也是以 RT8884B 为例。

1.2. DCR 电流检测网络之设计
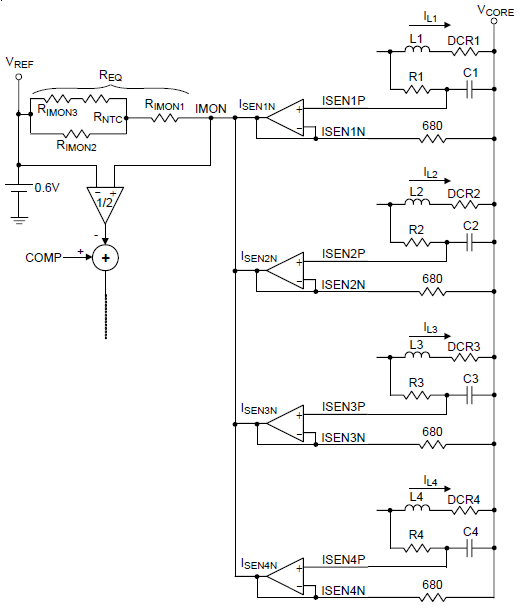
图一、RT8884B 完整电流回路示意图。
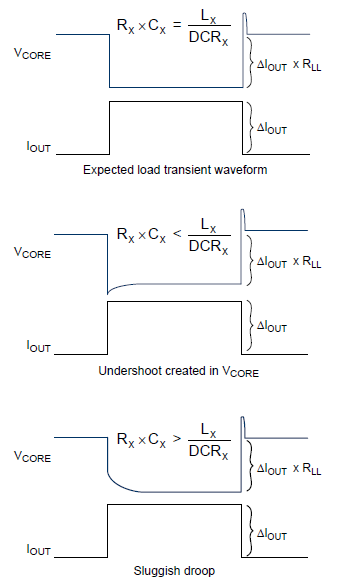
图二、对应不同 τCx 和 τLx 时间常数关系的输出波形。
图一显示应用 RT8884B 时,完整的电流回路图。在ACLL性能和DCLL精确度上,DCR电流检测的电路设计扮演非常重要的角色。对于不同 RC 时间常数的设计,ACLL 输出电压的瞬态变化可分成以下三种情况。图二即显示了对应三种不同 τCx 和 τLx 时间常数关系的输出波形。
• 若 τCx 等于 τLx,预期的负载瞬态波形是可设计的。
• 若 τCx 小于 τLx,输出电压会突然下降,下冲规格的裕量会减少。
• 若 τCx 大于 τLx,在负载增加时,输出电压会缓慢地下降。
 (3)
(3)
其中,DCRx 是电感的等效电阻、Lx 是电感值,而 Rx 和 Cx 是 DCR 电流检测网络中的元件值。
通常会将时间常数 τCx 设计为等于或稍大于时间常数 τLx,以防止过冲和下冲,如此电路便有较多的裕量可通过设计的规格。特别要注意的是,Cx值可能会因为偏压,温度或频率...等因素变小,所以在设计 DCR 电流检测网络时,需要将Cx 值变小的效应考虑进来。
由于电感器的铜线具有正温度系数,DCR 值会随负载电流的增加而线性增加。因此,为了达到更好的 DCLL 性能,必须使用由 NTC 热敏电阻(REQ)构成的热补偿电路,以补偿电感 DCR的正温度系数。详细的热补偿电路设计,可以参考特定产品的设计工具。
1.3. 负载线设计
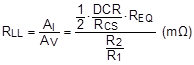
在 G-NAVPTM 架构中,负载线的设计和电流回路增益与电压回路增益之比有关。详细的负载线方程式均可在对应的 IC 规格书中找到。以下以 RT8884B 为例。
 (4)
(4)
其中,DCR(25℃)= 0.72mΩ,RCS = 680Ω 是电流检测电阻,REQ(25℃)是用于热补偿设计的电阻值,而 R2 / R1是补偿器的AV 增益。藉由此方程式,可以透过调整补偿器的 AV 增益而很容易地改变负载线。按照英特尔的VR12.5 的要求,负载线须是1.5(mΩ) ,所以就可以算出了 AV 增益 R2 / R1。 以下以 RT8884B 作为范例,并且选 R1 = 10kΩ。

2. 布局注意事项
若能注意印刷电路板上布局的细节,对于能有低开关损耗、干净无噪声及稳定的操作是非常重要的。开关功率级则特别需要留意。如果可能的话,应将所有功率元件放在电路板的上方,并且使接地端子相互靠近。参考以下布局原则,有助于能有最佳性能的 PCB 布局:
2.1. 功率级布局原则
• 尽量保持大电流的路径短愈短愈好,特别是接地端子的。
• 尽可能保持电源走线和负载之间的联机都很短;这对达到高效率是非常重要的。
• 若必须在电感的充电路径和放电路径之间作取舍,较好的选择是让电感的充电路径比放电路径长。
2.2.IC检测垫和RGND布局原则
• 尽量将电流检测元件(CX, RCSX, RX)放置靠近控制器的位置,以避免电流检测信号被噪声干扰。
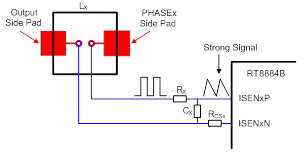
图三、电流检测元件的放置。
• 作为电流限制和电压定位的 ISENxP 和 ISENxN,其联机方式必须采用凯文 (Kelvin) 检测连接法,以确保电流检测的精确度。电感的走线是直接从电感的接触垫开始,而不是从电感的连接平面。
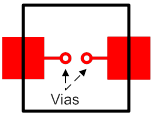
图四、电流检测走线中的电感接触垫。
• 从电感检测节点出来的 PCB 走线都应平行地回控制器。通常,这些走线都走电感下方的 PCB 底层。如果这些走线是走在内层,则必须在电流检测走线之上有一个接地平面,以作为和上层之间的屏蔽。
• 尽量将高速开关节点 (PWM,UG,LG,相位,等...) 远离较敏感的模拟区域(COMP,FB,ISENxP,ISENxN,等...)。
• 用户需要透过低阻抗路径将散热焊盘连接到接地平面。建议至少使用5个通孔 (via) 连接到 PCB 内层的接地平面。
3. 实验结果与结论
3.1 实验结果
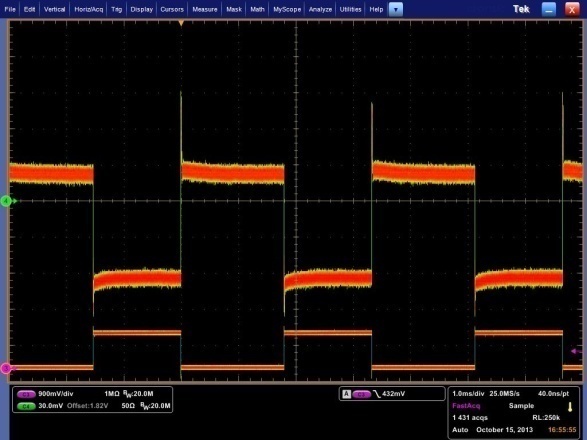
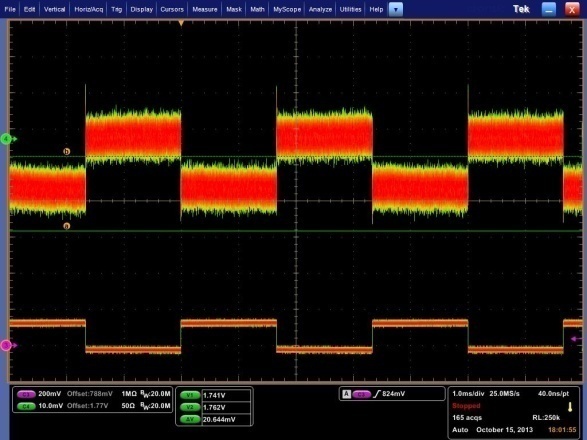
图五显示了RT8884B EVB样品,这是用在 VR12.5 之应用中,并支援 4/3/2/1相。量测的负载线曲线和效率均显示在图六。从所测量的结果可知,G-NAVPTM 架构可提供准确的负载线,并仍然维持较高的效率。图七显示瞬态的大抽载变化和小抽载变化之波形,由图可看出快速和稳定的瞬态性能并良好的 AVP 控制。

图五、RT8884B的 EVB 样本。
表一、EVB测试条件
|
VIN
|
12V
|
|
VOUT
|
1.8V @PS0
|
|
Phase Number
|
4
|
|
Ls
|
360nH / 0.72mΩ
|
|
Co
|
OSCON : 470µF / 4.5mΩ*4
MLCC : 22µF*19
|
图六、量测 RT8884B 的负载线和效率。
|
|
|
|
(CH3: 抽载电流 (900mV/Div) ; CH4: 输出电压 (30mV/Div))
|
|
(a) 大抽载变化(1A-61A) ACLL @300Hz
|
(b) 小负载变化(50A-60A) ACLL @300Hz
|
图七、RT8884B ACLL 之测量结果。
3.2 结论
系统的元件设计通常需要在许多的限制之间作出取舍,以获得在效率和性能中最大的效益。此外,有一些特殊的布局技巧可减少寄生元件的影响,以避免高速开关噪声耦合的效应。本应用须知介绍了 G-NAVPTM 控制架构一般的设计方法和 PCB 布局的规则。按照以上所介绍的方式,使用者即可很容易地使用立锜的控制IC。
4. 参考数据
[1] 立锜科技, RT8884B 规格书.
[2] Intel 文件, “Shark Bay Ultrabook™ Platform Power Delivery”
[3] Intel 文件, “Shark Bay Mobile Platform Power Delivery”
[4] Intel 文件, “Shark Bay Desktop and Denlow-WS Platform”